
Ideen und Konzept:
Das Spiel Teufelsband orientiert sich an Duck-Shoot. Bei dem Originalspiel muss man vorbeifahrende Enten, welche auf einem Band befestigt sind, mit einer Luftpistole abschießen. In dieser Version, dem “Teufelsband”, wurde diese durch einen kleinen Roboterarm ersetzt.
Hardware:
Arduino Uno
für das Laufband:
Adafruit Motor Shield v2.3
3.9V Nema 8 Bipolar 1.8° Stepper Motor
Labornetzteil
für den Roboterarm & Joystick:
3x SG90 9g Servo Motor
GY-521 Beschleunigungssensor
Pushbutton
10k Ω Widerstand
für die Spielanzeige:
2x LED 5mm blau
2x LED 5mm weiß
Duo-LED 8mm grün-rot
5x 220 Ω Widerstand
für den selbstgebauten Sensor:
zwei Kabel
1Mio Ω Widerstand
Hardware Architektur:
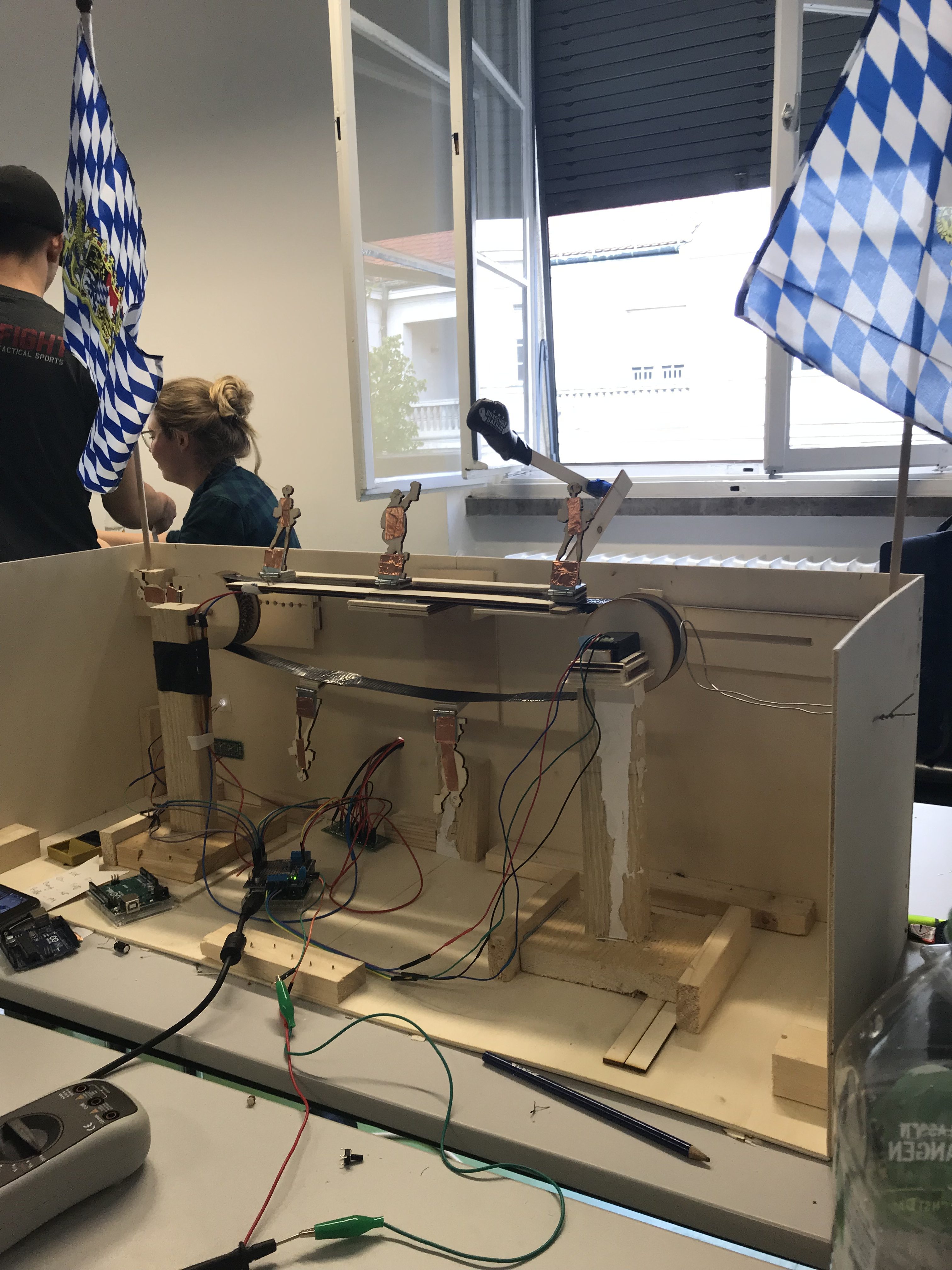
Das Band, an welchem die Figuren befestigt sind, ist aus Panzertape geformt. Sieben Figuren mit zwei unterschiedlichen Formen kleben mit Hilfe von Scharnieren am Panzertape. Die beiden Zahnräder bestehen aus vielen einzelnen zusammengeklebten Sternen welche auf zwei Halterungen platziert sind. Am rechten Zahnrad ist der Schrittmotor befestigt. Eine Führungsschiene leitet die Figuren zum anderen Zahnrad. Mit einem Draht an der rechten Innenseite werden die Figuren nach einem Durchgang wieder aufgestellt. Da die Stromversorgung des Arduinos nicht ausreicht um den Schrittmotor zu versorgen, wird hier ein Labornetzteil zur externen Stromversorgung verwendet. Dieses kann direkt mit etwa 5V und 0.3A an den zweipoligen Stromanschluss des Motor Shields angeschlossen werden.
Der Roboterarm besteht aus drei Servomotoren und einem Controller mit Beschleunigungssensor und einem Pushbutton der es uns ermöglicht den Arm durch einfache Handbewegungen zu steuern und per Knopfdruck einen Schlag auszulösen um vorbeifahrende Holzfiguren dadurch umzuwerfen. Die umgefallenen Figuren werden durch einen selbstgebauten Sensor erkannt und gezählt. Die Anschlüsse für den Roboterarm wie auch für den Joystick sind auf eine Platine gelötet.

Software-Architektur:
Verbindet man nun den Arduino per USB an eine passende Stromquelle (zB. an einen Computer) und stellt das Labornetzteil auf 5V und 0.3A ein, startet das “Teufelsband”.
In der Startphase sieht man nur die LEDs auf und ab blinken, des Band und der Arm bewegen sich jedoch nicht und die große LED leuchtet rot. Wenn man nun einmal den Button des Joysticks drückt, blinkt die große LED erst rot, dann orange und anschließend grün.
Nun beginnt sich der Schrittmotor, und damit auch das Band mit den Figuren zu drehen.
Ab jetzt kann man auch den Roboterarm über horizontale und vertikale Neigungen des Joysticks nach links und rechts drehen sowie die Höhe der “Faust” des Arms bestimmen. Dies wurde durch die Verwendung des Beschleunigungssensors realisiert. Ein Drücken auf den Button löst nun einen Schlag des Roboterarms nach vorne aus. Wenn es dem Spieler gelingt eine Figur umzuwerfen, wird dies durch den selbstgebauten Sensor erkannt und der Punktestand wird inkrementiert. Da die Figuren auf der Rückseite mit leitfähigem Kupferband beklebt sind entsteht ein Kontakt zwischen den beiden Kabeln, was als Input im Arduino, ähnlich dem Drücken eines Buttons registriert wird. Sind 40 Sekunden vergangen, oder hat der Spieler 15 Punkte erreicht, so stoppt das Band und der Roboterarm geht in seine Ursprungsposition zurück.
Die Punkteanzeige blinkt dreimal auf und zeigt weiterhin den Score an, bis der Button des Joysticks erneut gedrückt wird. Nun kommt man wieder in die Startphase des Spiels zürück.
Video